Table des
matières
b.
Enregistrement et ouverture
2. Description du nouvel automate
a.
Sauvegarde de traces commandé par le moteur et/ou l’interface
b. Ouverture
/ sauvegarde d’un automate demandé par l’interface
c. Ouverture
d’un état précédent demandé par l’interface
5. Ouvrir un automate existant
7. Contrôler l’évolution d’un
automate
8. Sauvegarde d’un état, d’un
automate
9. Ouverture d’un état précédent
I. Introduction
Dans le
cadre du module projet de licence d’informatique, notre groupe a choisi le
sujet intitulé Simulation d’Automates Cellulaires. Il s’agit de faire un
logiciel permettant de simuler des automates cellulaires.
Un
automate cellulaire est un ensemble de cellules qui évoluent dans un ensemble
d’états fini, au cours d’un temps discret. Les automates cellulaires se
différencient par la forme de la cellule, les états que peut prendre chaque
cellule, les règles d’évolution et les cellules voisines à prendre en compte
pour l’évolution.
L’objectif
de ce projet de génie logiciel est de produire un programme capable de
modéliser un grand nombre d’automates cellulaires, grâce à un large éventail de
paramètres configurables par l’utilisateur.
Tout
d’abord, nous présenterons le concept d’automate cellulaire puis nous
détaillerons le sujet de ce projet. Ensuite nous expliquerons le fonctionnement
de chaque module composant le logiciel ProSAC (Projet
de Simulation d’Automates Cellulaires).
Enfin, avant de conclure, nous vous initierons à l’utilisation de ProSAC.
II. Les automates cellulaires
1. Qu’est-ce qu’un automate ?
· Définition
Un automate cellulaire est un système dynamique discret.
système : c’est un ensemble d’entités, ici appelées cellules.
dynamique : cela implique des changements d’état, une succession de générations de cellules.
discret : le nombre fini d’états pour chaque cellule implique des étapes successives.
· Caractéristiques
Un automate cellulaire est un réseau de cellules identiques dont l’état à l’instant t+1 est calculé en fonction de ses cellules avoisinantes, les cellules émettant leur résultat en même temps.
Pour déterminer un automate particulier, il faut donc définir ses 4 caractéristiques.
· le treillis :
C’est le maillage des cellules. On choisit la forme des cellules (rectangulaire, triangulaire, …), la dimension du réseau (2D, 3D), et la taille de la trame.
· le voisinage :
C’est l’ensemble des cellules à prendre en compte pour le calcul de l’état suivant de chaque cellule.
· les états :
Ce sont les différentes possibilités d’évolution d’une cellule.
· les règles d’évolution :
Ce sont les fonctions qui définissent l’état d’une cellule à t+1 en fonction de l’état de ses voisines à l’instant t.
2. Historique
Les automates cellulaires sont contemporains des touts premiers ordinateurs. On les doit à John von Neumann qui, à travers eux, visait à décrire par le calcul le phénomène biologique de l’auto-reproduction.
Tout commence, en 1948, au laboratoire de Los Alamos. John von Neumann et Stan Ulam étaient passionnés par les débuts du calcul électronique mais aussi par la structure du système nerveux et par la biologie moléculaire. Ulam s’intéressait également à la modélisation de la croissance cristalline, et von Neumann, inspiré pas ses essais, mit alors au point le modèle initial d’architecture cellulaire. Cette machine abstraite devait lui servir de support pour mener à bien un but particulièrement réductionniste : décrire par un algorithme les processus de reproduction de systèmes vivants. Toutefois, von Neumann se donnait simplement pour projet de concevoir ce qu’il appela un "automate cellulaire auto-reproducteur".
La conception de cette machine auto-reproductive fut complétée par Arthur Burks, qui avait été son collaborateur pour la construction d’un ordinateur, l’EDVAC (Electronic Discrete Variable Automatic Computer).
Presque 20 ans après les premiers travaux de von Neumann, en 1968, Edgar Codd puis, en 1984, Christopher Langton, ont travaillé à simplifier considérablement les automates cellulaires auto-reproducteurs.
Reprenant la théorie des automates auto-reproducteurs de von Neumann, Christopher Langton créa en 1984 le premier automate cellulaire. Contrairement à l’entité « cellule » du jeu de la vie possédant uniquement un état « vivant » et un état « mort », cet automate, plus complexe, est composé d’une centaine de cellules comprenant 8 états possibles.
Les automates cellulaires peuvent être vus comme un modèle de parallélisme massif. Ils ont été dès les années soixante considérés comme tels. Ils ont d’abord été vus comme reconnaisseurs de langages, ce qui évite tout problème de définition de la notion d’entrées-sorties. Dans ce cadre, leur puissance a été intensivement étudiée (voir l’état de l’art de M. Delorme et J. Mazoyer).
Les plus célèbres des règles pour les automates dont les cellules ont 2 états possibles sont celles du « jeu de la vie » inventé par John Horton Conway, en 1970. Lorsqu’il est simulé, son évolution évoque des micro-organismes qui nagent, se reproduisent, mangent et sont à leur tour mangés.
C’est notamment grâce au jeu de la vie que, vers la fin des années 1970, a resurgi l’idée selon laquelle il était possible de simuler des phénomènes physiques complexes en les décrivant à l’aide d’automates cellulaires.
En 1981, Thomaso Toffoli a construit au M.I.T. un circuit électronique spécialement conçu pour la simulation d’automates cellulaires.
A partir de 1980, le physicien anglais Stephen Wolfram a mené une étude et une classification systématique sur les automates à 2 et 3 états.
Vous pourrez trouver des modèles d’automates et des liens vers des sites sur les automates cellulaires sur le site ProSAC (http://prosac.valken.org/), dont une copie est présente sur le CD-ROM fourni.
3. Utilisation
Les automates cellulaires permettent de modéliser des systèmes réactifs, c’est-à-dire des systèmes qui évoluent par réaction à des phénomènes.
Ces réactions sont décrites par des règles physiques, chimiques, biologiques, etc…
On peut ainsi trouver des modélisations :
- de systèmes gazeux,
- de vagues chimiques,
- de l’évolution de bactéries,
- de l’évolution d’incendies,
- etc…
Grâce aux expérimentations intensives de Wolfram, vers 1984, Norman Packard a notamment recréé des dynamiques de croissances cristallines.
Les équipes d’Yves Pomeau, d’Uriel Frisch, et de Brosl Hasslacher ont, dès 1985, simulé des phénomènes complexes d’écoulement de fluides par des règles de collision de particules dans des réseaux cellulaires hexagonaux.
Un problème abstrait très étudié est celui de la synchronisation d’une ligne de fusiliers (firing squad). Ce problème a notamment d’importantes implications en calcul parallèle (processeurs, ordinateurs).
Le choix des configurations de cellules et des règles de transition permettrait, d’après R. Feynman, de simuler le temps, les probabilités ou encore les effets quantiques.
III. Sujet du projet
Le
but du projet intitulé Simulation d’Automates Cellulaires est de produire un
logiciel qui permet de visualiser l’évolution d’automates cellulaires. Ces
automates doivent être configurables au maximum (treillis, voisinage, états,
règles). L’évolution est visualisée en mode graphique. L’utilisateur a la
possibilité de reprendre la simulation à une étape antérieure, grâce à un
historique.
Le
logiciel se limite à des modèles bidimensionnels, et tente de répondre au mieux
aux objectifs du projet. Dans cette perspective, les efforts sont portés sur
les fonctionnalités du logiciel, et non à l’optimisation du code.
IV. Les modules de ProSAC
1. Interface graphique
L’interface graphique est le centre de contrôle général du
programme. C’est à partir de là que se font les saisies et sont fixés les
paramètres.
Elle comporte des menus « Office compatible », réalisés
à l’aide des composants Swing, des boutons scope. Le détail des options
du menu et de leur fonction sera discutée dans le fonctionnement du logiciel.
a. Affichage de l’automate
L’interface utilise les informations concernant le treillis et les
états pour afficher l’écran de « Saisie de l’automate initial ». Il
s’agit en fait de l’interface principale, et l’automate est saisi sur le
treillis qui est utilisé pour l’animation. Le mécanisme de saisie suivant est
celui utilisé dans l’affichage des états.
Quand l’utilisateur clique sur une case, le programme détermine
les coordonnées de la case choisie à partir des coordonnées indiquées par la
souris. Le programme remplit alors cette case par la couleur ou le symbole de
l’état suivant (les valeurs des états sont dans un vecteur).
Pour l’affichage des états, le mécanisme est le même, sauf que
l’action est initiée par le moteur, qui envoie le tableau d’état à afficher.
L’affichage se charge alors de parcourir le tableau reçu et de le comparer au
tableau actuel et de redessiner uniquement les cases qui ont changé. Cette
méthode permet d’économiser un peu de temps de calcul, en évitant de redessiner
le quadrillage.
b. Enregistrement et ouverture
Une fois l’automate de départ saisi, l’interface envoie le tableau
au module de traces, qui le stocke dans le fichier d’historique.
L’interface saisit également les paramètres de traces et
d’affichage fournis par la suite au moteur lors de son lancement. Elle agit
aussi sur le moteur en interrompant ou en stoppant le déroulement du thread,
par les commandes d’exécution et les boutons scope.
L’interface permet de saisir les noms des fichiers et les chemins
correspondant lors des opérations d’ouverture et de sauvegarde. Les états sont
ouverts et sauvegardés vers un fichier compressé ; les automates – les
classes décrivant l’automate, et le fichier compressé d’états correspondant,
sont déplacés vers un répertoire du choix de l’utilisateur. En pratique, le
module de traces ne peut pas s’exécuter seul, il est intégré au programme.
c. Messages d’erreur
L’interface gère les messages d’erreur des divers modules, qui ne
disposent pas d’affichage graphique propre, et donc d’aucun moyen de
communication directe avec l’utilisateur.
2. Description du nouvel automate
L’interface intègre la partie « Description de l’automate ».
La saisie, décomposée en quatre fenêtres, a pour but de recueillir les
différents paramètres de l’automate à modéliser : la forme et la taille du
treillis, le nombre et la nature des états, le voisinage, les règles.
Le cheminement pas à pas dans la description du nouvel automate
étant réalisée dans le paragraphe « V. Fonctionnement du logiciel »,
nous allons ici parler de cette partie d’un point de vue plus technique, en
distinguant chaque étape de la description.
Les boutons « Aide » de la description font apparaître
un texte explicatif relatif à la fenêtre ouverte.
Lorsque l’utilisateur revient en arrière, nous avons supposé que
c’était pour modifier l’automate et donc les paramètres qu’il a entrés ne sont
pas visibles mais restent malgré tout en mémoire. S’il ne les modifie pas, les
anciennes données restent inchangées.
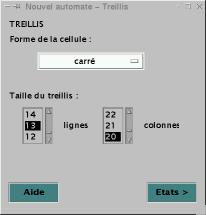
a. Etape 1 : le treillis
Cette étape a pour but de récupérer la forme des cellules et la
taille du treillis.
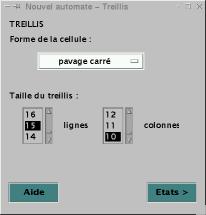
Figure 1
· La forme des cellules
Par défaut, les cellules sont de forme carrée mais l’utilisateur
peut choisir l’une des formes proposées : « carré »,
« rectangulaire », « pavage carré » ou
« pavage rectangulaire ». Lorsqu’une forme est sélectionnée, on
sauve le code correspondant à la forme, respectivement c, r, pc, pr.
· La taille du treillis
Initialement, le treillis fait 10 lignes sur 10 colonnes.
L’utilisateur peut choisir le nombre de lignes et de colonnes indépendamment
l’un de l’autre. Ces valeurs sont comprises entre 2 et 80. La borne maximum a
été déterminée pour que les cellules ne soient pas trop petites.
Le bouton « Etats > » fait passer l’utilisateur à la
deuxième étape.
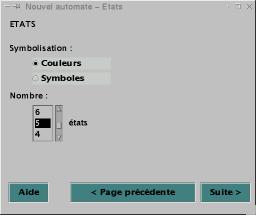
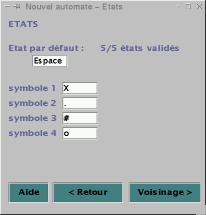
b. Etape 2 : les états
Cette étape, dont l’objectif est d’obtenir le type de
symbolisation, le nombre d’états et les états eux-mêmes, est décomposée en 2
fenêtres.
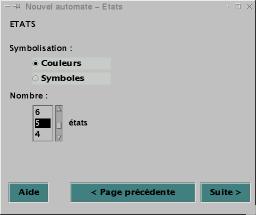
Figure 2
· La symbolisation
L’utilisateur a le choix entre une symbolisation à l’aide de
couleurs ou de symboles. Les boutons de choix sont placés dans un groupe
logique, par conséquent, ce choix est exclusif. Par défaut, les couleurs sont
choisies.
· Le nombre d’états
Initialement et au minimum, ce nombre est de 2. A l’aide d’une
liste de valeurs fixées (de 2 à 10), l’utilisateur peut choisir la quantité
d’états qu’il désire. Nous lui fixons cependant ces limites pour que la
visualisation soit claire.
|
Figure
3 |
Figure
4 |

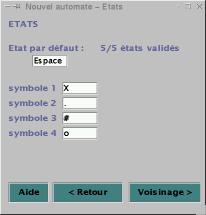
· Les états
-
Couleurs
(Figure 3)
L’état par défaut est à choisir dans la liste déroulante. Elle
contient la liste des couleurs choisies par l’utilisateur. Choisir une nouvelle
couleur pour l’état par défaut annule le choix des autres couleurs. La couleur
par défaut ne peut pas être cliquée dans les autres couleurs.
Les autres couleurs sont présentées avec un bouton pour chacune.
A chaque clic sur une nouvelle couleur,
on vérifie que cette couleur n’est pas celle de l’état par défaut et si le
nombre de couleurs total est égal au nombre d’états, on bloque le choix en grisant
les couleurs non choisies. Si l’utilisateur clique ensuite sur une couleur déjà
sélectionnée, on débloque les couleurs grisées pour qu’il puisse faire un
nouveau choix.
-
Symboles
(Figure 4)
La saisie des symboles se passe de la même façon. La seule
différence est que la saisie se fait au clavier.
Le bouton « < Retour » ramène l’utilisateur à la
fenêtre précédente, c’est-à-dire au début de la saisie des états. Le bouton
« Voisinage > » fait passer l’utilisateur à la troisième étape.
c. Etape 3 : le voisinage
Cette étape a pour but de récupérer les cellules à prendre en
compte pour l’évolution d’une cellule.
On affiche un treillis correspondant aux données fournies par
l’utilisateur (Figure 5). La cellule centrale est colorée en rouge. S'il y a un
nombre pair de cellules, on a choisi de prendre la partie entière de la
division du nombre de lignes et/ou de colonnes par 2.
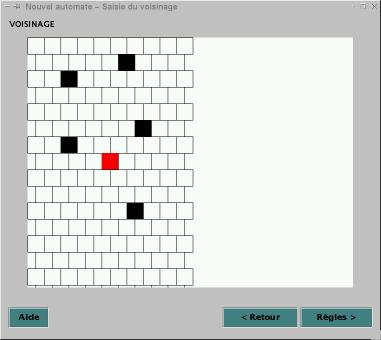
Figure 5
L’utilisateur doit cliquer sur les cellules qu’il souhaite prendre
en compte. Les cellules qui seront prises en compte sont noircies.
Le bouton « < Retour » ramène l’utilisateur à la
saisie des états. Le bouton « Règles > » fait passer
l’utilisateur à la quatrième et dernière étape de la description du nouvel
automate.
d. Etape 4 : les règles
Cette étape a pour objectif de prendre les règles d’évolution des
cellules.
|
Figure 6 |
Figure 7 |
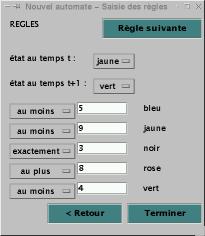

L’utilisateur doit entrer chaque règle d'évolution les unes après
les autres. Il peut passer à la règle suivante avec le bouton « Règle
suivante » (Figures 6, 7). Pour saisir une règle, l’utilisateur choisit
l’état aux temps t et t+1 dans 2 listes contenant les états
enregistrés précédemment.
Pour chaque état, l’utilisateur doit ensuite choisir le
quantificateur dans une liste prédéfinie et entrer le nombre de cellules.
Le bouton « < Retour » ramène l’utilisateur à la
saisie du voisinage. Le bouton « Terminer » sauve la dernière règle
et fait passer l’utilisateur à la fenêtre finale.
e. Fenêtre finale
Cette fenêtre finale affiche les paramètres entrés par
l’utilisateur au cours de la saisie du nouvel automate. Le bouton « <
Retour » ramène l’utilisateur à la première étape. Le bouton
« Annuler » fait sortir l’utilisateur de la description sans rien
sauver. Le bouton « Enregistrer » lance la sauvegarde des paramètres
et ferme les fenêtres de la description.
L’interface lancera ensuite le compilateur, puis le compilateur javac,
afin de créer des classes utilisables par le moteur. A noter ici que
l’interface lance des applications externes. En effet, le compilateur (cf. IV.
3. Compilateur) est un programme C, fourni par Lex/Yacc,
et qui n’est donc pas directement implémentable dans le reste du programme,
écrit en Java. Les traces seront chargées par l’interface de placer les
classes compilées à disposition du moteur.
3. Compilateur
Le compilateur a pour rôle de construire la classe regle qui hérite de la classe automate et implémente ses fonctions de
calcul du voisinage et d'évolution. Il reçoit deux chaînes de la part de
l'interface graphique, plus précisément de la partie d'entrée de l'automate de
départ, celles-ci étant stockées dans le fichier « regles ». Elles décrivent le « voisinage » et les « regles »,
elles respectent une grammaire définie à l'avance, entrées par saisie guidée.
Le compilateur, un ensemble de fichiers Lex et Yacc, n'a plus
qu’à analyser le fichier et produire la classe voulue.
a. Définition du voisinage
Mots reconnus :
dv, annonce le début de
l’énumération du voisinage.
fv, annonce la fin de l'énumération
du voisinage.
énumération : liste des coordonnées
des cellules appartenant au voisinage d'une cellule (i,j).
Action :
On reçoit la coordonnée « (i-1,j-1) »,
le compilateur reconnaît l’expression et sait qu’il doit implémenter le vecteur
voisinage de l’automate avec la « paire » (-1,-1), pour cela, il doit faire appel à la fonction « remplivoisinage » de l'automate, il note donc
l’appel à cette fonction dans son « main »,
qui sera lancé à la création du nouvel automate.
b. Définition des règles
Mots reconnus :
DR, annonce le début de l’énumération
des règles.
FR, annonce la fin de l’énumération
des règles.
dr, annonce le début de l’énoncé
d'une règle.
fr, annonce la fin de l’énoncé
d’une règle.
règle : état initial - état
d'arrivée - condition(s).
condition : (m|p|e) nombre symbole.
(m signifie au moins, p signifie au plus, e signifie exactement).
Exemple :
On reçoit la règle « noir blanc e 3 blanc », elle signifie : si la cellule est noire à l'état t,
s’il y a exactement 3 cellules blanches dans son voisinage alors elle devient
blanche à l'état t+1.
Action :
A chaque règle correspond une liste de « if » imbriqués, on teste donc l’évolution d'une cellule par le
passage successif dans ces listes.
Le compilateur en prenant en entrée le fichier « regle », construit donc une classe java nommée « regle.java » qui sera ensuite utilisée par le moteur, pour le calcul de
l’évolution de l’automate.
4. Moteur
Le moteur est un module central, dont le rôle est de calculer les
états d’évolution de l’automate en communiquant avec les autres modules.
Il manipule un objet de la classe automate et dispose d’un
compteur interne qui lui permet de connaître le numéro d’itération .
A son lancement, il reçoit trois paramètres : un intervalle
d’affichage, un intervalle de sauvegarde, un nombre d’itérations maximum à
calculer (infini par défaut). Ainsi, il appellera les modules concernés en
temps voulu : l’interface graphique pour l’affichage, le module de trace
pour la sauvegarde.
Ensuite, il crée l'automate et l’initialise selon les données
fournies par l’utilisateur dans l'interface graphique (stockées dans un
fichier).
Enfin, le calculateur est lance dans un thread particulier
pour pouvoir être suspendu, relancé ou stoppé facilement. Les états de
l'automate à l'étape t+1 sont calculés à partir de ceux de l'étape t
et des règles d’évolution fournies par le compilateur. Pour chaque cellule, on
définit les états de son voisinage, puis on voit si celle-ci garde son état
actuel ou si elle évolue.
Le moteur utilise toujours les mêmes fichiers, les mêmes fonctions
de calcul du voisinage et d’évolution, mais ceux-ci changent de contenu à
chaque création d'un nouvel automate ou de chargement d'un ancien automate, le
moteur est ainsi inconscient de son
polymorphisme.
5. Traces
Le module d’entrées – sorties, ou traces, est le composant du
logiciel chargé de toutes les opérations disque, à l’exception de la
description.
Les traces doivent gérer trois types d’appels différents :
· sauvegarde de traces commandée par
le moteur et/ou l’interface,
· ouverture / sauvegarde d’un
automate demandé par l’interface,
· ouverture d’un état précédent
demandé par l’interface.
a. Sauvegarde de traces commandé par
le moteur et/ou l’interface
Il s’agit de sauvegarder des états de l’automate en évolution à
intervalles réguliers (toutes les 10 itérations par défaut), pour avoir un
historique d’évolution. Dans ce cas, le moteur fournit aux traces un tableau
d’entiers correspondant à l’état à sauvegarder. Ce tableau est mis dans un
fichier contenu dans une archive au format Zip. Ce fichier est créé à l’aide
des classes ZipFile et ZipOutputStream
de Java. Le moteur crée une classe OutState,
et appelle sa méthode storeState pour enregistrer un fichier d’état
contenant les valeurs du tableau d’entiers. A sa création, la classe OutState vérifie si le fichier à ouvrir existe – cas d’un automate
existant. Si oui, une nouvelle archive est créée sous le nom
« ProSACState.zip », où sont recopiées les entrées de l’archive
précédente. Sinon, une nouvelle archive est créée et l’état est enregistré. Il
semble à l’heure actuelle qu’il ne soit pas possible avec les fonctions de Java
d’ajouter des entrées à un fichier compressé sans écraser son contenu, donc les
entrées précédemment ajoutées.
Les fichiers d’état portent un nom du type EtatN.sta, où N est le
numéro d’itération. La taille de
l’archive devrait être réduite, les tableaux d’entiers se rapprochant
dans leur structure des images bitmap, donc efficacement compressibles. La
structure du fichier est très rudimentaire : il ne contient que les
valeurs du tableau d’entiers décrivant l’état, et aucune autre indication. Le
numéro d’itération est déterminé par le nom du fichier. Le fichier d’état ne
contient pas non plus d’indications en ce qui concerne la dimension du tableau.
Le moteur fournira ces informations lors de l’ouverture d’un état.
L’utilisateur peut choisir d’enregistrer un état en particulier.
Dans ce cas, le tableau correspondant à l’état désiré est sauvé dans le fichier
de traces, avec le numéro d’état en cours. Cette sauvegarde interrompt l’évolution
de l’automate pendant l’opération.
b. Ouverture / sauvegarde d’un
automate demandé par l’interface
Une fois la compilation terminée, il nous faut placer les fichiers
« .class » dans le répertoire du
moteur. Les traces copient ces fichiers vers le package « moteur ».
De même, lorsque l’utilisateur souhaite ouvrir un automate
précédemment enregistré ou sauvegarder son automate (description et états), les
traces déplacent les fichiers « .class »,
le fichier « .rul » et l’archive d’historique
vers le répertoire du moteur, ou le répertoire de sauvegarde désigné via
l’interface.
c. Ouverture d’un état précédent
demandé par l’interface
L’utilisateur peut demander à reprendre l’évolution à partir d’un
point précédemment calculé. L’interface appelle alors les traces, qui lui
rendent la liste des fichiers contenus dans l’archive d’historique, dans une Enumeration. L’utilisateur choisit un état parmi ceux-ci, et les traces
extraient le fichier correspondant, lisent le tableau d’entiers, et le
transmettent vers le moteur et l’interface, qui mettent à jour leurs tableaux
d’état.
V. Fonctionnement du logiciel
1. Bienvenue
ProSAC
est un simulateur d’automates cellulaires configurable vous permettant de
définir et visualiser l’évolution de tels automates, et de générer un historique
d’évolution.
ProSAC, dans sa version actuelle, peut
être exécuté sous Java Runtime Environment 1.2 et supérieur. Il est fourni avec
les sources du compilateur, ainsi que des exécutables pour
HP-UX, FreeBSD, Linux et Windows 32 bits. Pour l’adapter à d’autres
environnements, vous devrez recompiler le compilateur pour le système cible.
2. Installation
Il vous suffit de recopier le répertoire /ProSAC du CD-ROM dans un répertoire local de votre choix, et d’y ajouter
le compilateur correspondant à votre système, parmi ceux disponibles dans le
répertoire /Compilateur du CD-ROM. Si votre environnement
n’y est pas représenté, il vous faudra générer un exécutable du compilateur
adapté, à partir des sources fournies dans le répertoire /Sources/Compilateur.
3. Premier
contact
Pour lancer l’application, vous devez entrer la ligne de commandes
suivante :
java ProSAC
Certains systèmes sont capables de lancer des programmes Java sans
un appel explicite à l’interpréteur java. Veuillez vous reporter à la
documentation de votre système pour de plas amples informations.
L’interface présente une barre de menu dans sa partie supérieure
(Figure 8).
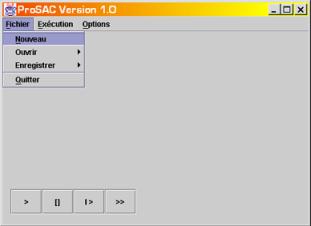
Figure 8
Les menus sont :
·
Fichier
o
Nouveau
Permet de définir un nouvel
automate.
o
Ouvrir
§
Etat
Ouvre un état précédemment
enregistré du fichier d’historique.
§
Automate
Ouvre un automate précédemment
enregistré d’un emplacement défini.
o
Enregistrer
§
Etat
Enregistre l’état en cours dans le
fichier d’historique.
§
Automate
Enregistre l’automate actuel à un emplacement
au choix.
o
Quitter
Ferme
l’application.
·
Exécution
o
Arrêt
Stoppe
l’évolution de l’automate.
o
Normal
Lance
l’évolution de l’automate avec les paramètres actuels.
o
Ralenti
Lance l’ évolution de l’automate en
réduisant l’intervalle d’affichage de 10.
o
Avance
rapide
Lance l’ évolution de l’automate en
augmentant l’intervalle d’affichage de 10.
·
Options
o
Paramètres
Permet de régler les paramètres
d’affichage, d’historique et de limite de calculs.
4. Créer un nouvel automate
Le premier menu est « Fichier ». Vous y trouverez la
commande « Nouveau », qui vous permet de définir un nouvel automate.
Vous obtenez alors une première fenêtre (Figure 9).
Un automate cellulaire est un réseau de cellules dont l’état à
l’instant t+1 est calculé en fonction de son état et de celui de ses
cellules avoisinantes au temps t.
Pour décrire un nouvel automate, vous devez donc configurer ses 4
caractéristiques : le treillis, les états, le voisinage et les règles
d’évolution.
Figure
9
Cette première étape vous permet de choisir la forme de la cellule
dans une liste de possibilités prédéfinies. Sélectionnez ensuite le nombre de
lignes et de colonnes que vous voulez visualiser. Ce nombre est compris entre 2
et 80 afin de ne pas obtenir des cellules trop petites. Cette fenêtre dispose
également de 2 boutons : « Aide » et « Etats > ».
Le bouton « Aide » fait apparaître un texte d’explications détaillées
sur cette fenêtre. Le bouton « Etats > » vous fait passer à
la deuxième fenêtre.
Figure
10
Cette deuxième étape est
consacrée aux états des cellules. Vous devez choisir comment les symboliser, le
nombre d’états. Choissez des couleurs (Figure 11) ou des symboles
(Figure 12). Le choix est exclusif. Vous pouvez prendre entre 2 et 10
états.
Dans la troisième fenêtre, si vous avez choisi de mettre des
couleurs, vous devez cliquer sur les cases de couleur que vous désirez. Si vous
avez choisi d’avoir n états, vous ne pourrez prendre que n-1
couleurs car vous devez également choisir une couleur pour l’état par défaut
dans la liste déroulante. Si vous avez choisi de mettre des symboles, vous
devez entrer le symbole par défaut et les autres n-1 symboles.
|
Figure
11 |
Figure
12 |

Cette fenêtre dispose également de 3 boutons :
« Aide », « < Retour » et
« Voisinage > ». Le bouton « Aide » fait apparaître
un texte d’explications détaillées. Le bouton « < Retour »
vous renvoie à la saisie du treillis. Le bouton
« Voisinage > » vous envoie sur la fenêtre suivante.
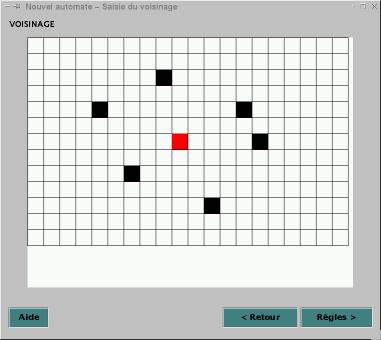
Figure 13
La saisie du voisinage
s’effectue sur un treillis aux dimensions réelles que vous avez spécifiées
auparavant (Figure 13). La cellule centrale est indiquée en rouge. Vous devez
cliquer sur les cellules à considérer pour l’évolution de la cellule rouge. Les
cellules cliquées deviennent noires.
En bas de la fenêtre, il y a 3 boutons. Le premier,
« Aide », a la même fonction que les boutons « Aide »
précédents. Le bouton « < Retour » vous renvoie à la saisie des
états et le bouton « Règles > » vous fait passer à la fenêtre
suivante.
|
Figure
14 |
Figure
15 |

Cette fenêtre vous propose de réaliser une saisie guidée des règles
d’évolution (Figures 14, 15). Vous devez entrer l’état de la cellule au temps
initial t et son état au temps suivant. Vous devez ensuite choisir
l’état de ses voisins pour que l’évolution ait lieu. Pour chaque état, vous
devez dire le nombre de voisins dans cet état et si le nombre est minimal,
maximal ou à respecter exactement. En cliquant sur le bouton « Règle
suivante », la règle est validée et vous pouvez en entrer une autre.
Cette dernière fenêtre vous récapitule les paramètres que vous
avez entrés. Le bouton « < Retour » vous ramène à la première
fenêtre de description, le bouton « Annuler » vous fait sortir de la
description sans rien sauver et le bouton « Enregistrer » sauve le
nouvel automate.
En bas de la fenêtre se trouvent les boutons « Aide »,
« < Retour » et « Terminer ». Le bouton
« Aide » affiche une aide, un clic sur « < Retour » vous
renvoie à la page précédente et le bouton « Terminer » valide la
dernière règle et vous ouvre la dernière fenêtre destinée à ce nouvel automate.
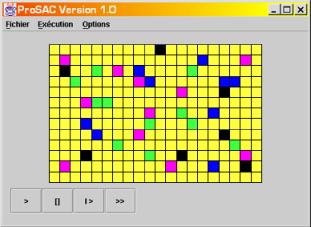
Figure 16
Après un petit temps d’attente nécessaire au traitement des
données de la description, la saisie de l’automate de départ s’effectue sur le
treillis de l’interface générale (Figure 16). Vous devez cliquer sur les cases
pour en changer l’état et ainsi définir l’automate initial.
5. Ouvrir un automate existant
L’ouverture d’un automate préalablement sauvegardé se fait par la
commande « Ouvrir / Description ». Elle ouvre une fenêtre
d’ouverture et permet de sélectionner l’automate à charger. Si un automate est
déjà défini, vous serez invité à enregistrer ou non l’automate en cours. Si
oui, l’automate courant ainsi que son fichier de traces sera sauvegardé à
l’emplacement de votre choix.
6. Lancer un automate
Une fois un automate saisi ou rappelé, vous serez invité à définir
les paramètres d’exécution.
Si vous souhaitez modifier les paramètres, l’écran de dialogue
« Paramètres » s’affiche (Figure 17). Cette fenêtre est aussi
accessible par le menu « Options / Paramètres ». Vous pouvez y
définir l’intervalle de sauvegarde des états dans le fichier d’historique (un
état sur 10 par défaut), l’intervalle d’affichage (tous les états par défaut),
le nombre maximal d’états à calculer (infini par défaut).

Figure 17
Une fois ces données
confirmées, l’automate est prêt à être exécuté. Le bouton « lecture »
ou la commande « Exécution / Normal » du menu (Figure 18) lance
l’animation de l’automate.
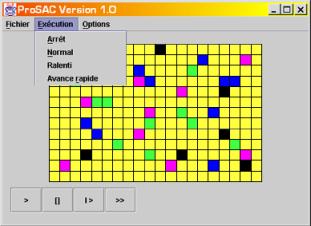
Figure 18
7. Contrôler l’évolution d’un automate
Sans passer par le menu « Exécution », vous pouvez
contrôler l’évolution de l’automate par les boutons
« lecture », « arrêt », « ralenti » et
« avance rapide ». Le bouton « lecture » lance ou relance
l’évolution de l’automate, et le bouton « arrêt » stoppe celle-ci.
Les boutons « ralenti » et « avance rapide » diminuent et
augmentent respectivement l’intervalle d’affichage de 10 états. Le bouton
« ralenti » n’a aucun effet si l’intervalle d’affichage vaut un
(afficher tous les états).
8. Sauvegarde d’un état, d’un automate
Vous pouvez sauvegarder un état en particulier ou enregistrer
l’automate en cours à un emplacement donné via la commande
« Enregistrer » du menu « Fichier ».
« Enregistrer » propose un sous-menu en cascade, composé de
« Etat » et de « Description ». La commande
« Etat » ouvre une fenêtre d’enregistrement standard. L’état en cours
sera sauvegardé dans le fichier d’historique. « Description » ouvre
une fenêtre similaire et saisit le chemin et le nom sous lequel sera sauvegardé votre automate.
9. Ouverture d’un état précédent
Il vous est possible de ramener l’automate à un état précédent. La
commande « Ouvrir / Etat » ouvre une fenêtre listant les
états sauvegardés dans le fichier d’historique, avec un numéro correspondant au
numéro d’étape de calcul (Figure 24). Choisissez l’état à restaurez et validez
avec le bouton « Charger ».
10. Quitter ProSAC
L’extinction du programme se fait par la commande
« Quitter » du menu
« Fichier ». Il vous sera demandé de confirmer votre choix,
puis si vous souhaitez enregistrer l’automate courant. Les opérations de
sauvegarde seront exécutées le cas échéant.

Figure 19
VI. Conclusion
Dans
ce document, nous avons vu le concept d’automates cellulaires, un réseau de
cellules évoluant suivant leur état et l’état de leurs « voisins » à
un temps donné. Le but du sujet était de modéliser un tel concept, avec un
grand nombre de paramètres modifiables. Pour remplir cette tâche, nous avons
conçu ProSAC, un simulateur d’automates cellulaires configurable.
Ecrit en Java, pour de diverses raisons dont la portabilité et la
modularité, il est capable de définir de nombreux automates cellulaires à deux
dimensions, d’afficher graphiquement leurs évolutions, et de reprendre l’évolution
à n’importe quelle itération. Les interactions avec l’utilisateur sont
effectuées par le biais de l’interface graphique, chargée d’afficher les états
de l’automate. Un compilateur, écrit en C via Lex et Yacc,
permet de fixer librement les paramètres de l’automate. Un moteur de calcul, en
Java, calcule les différentes étapes de l’évolution. Les états à
sauvegarder sont transmis à un module d’entrées – sorties, ce qui permettra de
tracer une historique de l’évolution.
Notons
ici l’effort fourni par notre équipe pour concevoir le logiciel en Java :
nombre d’entre nous ne connaissions pas ce langage avant ce projet. ProSAC
n’est pas directement portable sur toutes les plate-formes, dû au compilateur,
écrit en C. Il faudrait le recompiler pour chaque nouvelle plate-forme.
Cette tâche obligatoire n’est pas compliquée mais reste une contrainte non
négligeable.
Des
améliorations peuvent encore être apportées au logiciel ProSAC.
La surface d’affichage, volontairement limitée ici pour garder l’interface
utilisable sur des machines Win32 bas de gamme, avec un affichage VGA, pourrait
être étendue ou paramétrable. L’amélioration la plus difficile et pourtant la
plus souhaitable serait d’écrire un moteur capable d’analyser lui-même les
règles et le voisinage d’après une grammaire définie. Le logiciel gagnerait en
homogénéité et en portabilité. Il serait détaché de toute architecture, le Java
servant de couche d’abstraction matérielle.